Task:

Our second task was to design and build a windlass. A windlass is a device generally used to haul or lift a bucket from a well. Taking what we learned with the drill press, thermal press and arbor press in class, and SolidWorks from the bottle opener task, we are to expand and put together a windlass of our own invention.
Challenge:
My partner, Jenny, and I had to create a windlass able to crank 1 liter of water with 10 cm above the surface of the table. The well is 12 cm in diameter and our windlass cannot use more than 500 cm^2 of delrin sheet. In addition, we are allowed a 50 cm delrin rod and 120 cm of string.
Day 1 and 2: Brainstorming
Our ideas were jotted on paper, a model with a rectangular base and triangular supports with a crank and wheel system to pull up the water.
Design 1:
Our original design was to tilt the two triangular side supports in to create more of a pyramid, triangle shape before realizing the multiple obstacles we would face in order to create pegs and slots, and connecting delrin sheets with piano wire at a tilted angle. Our original design also had a form of wheel and pulley system in between the two tilted triangular parts and a crank on the side of one of the supports to crank up the water.
Design 2:


However, we kept the triangular supports on the side but instead put them upright and would connect them with a support beam across from the bottom of one side to the top of the other for triangular rather than a square support.
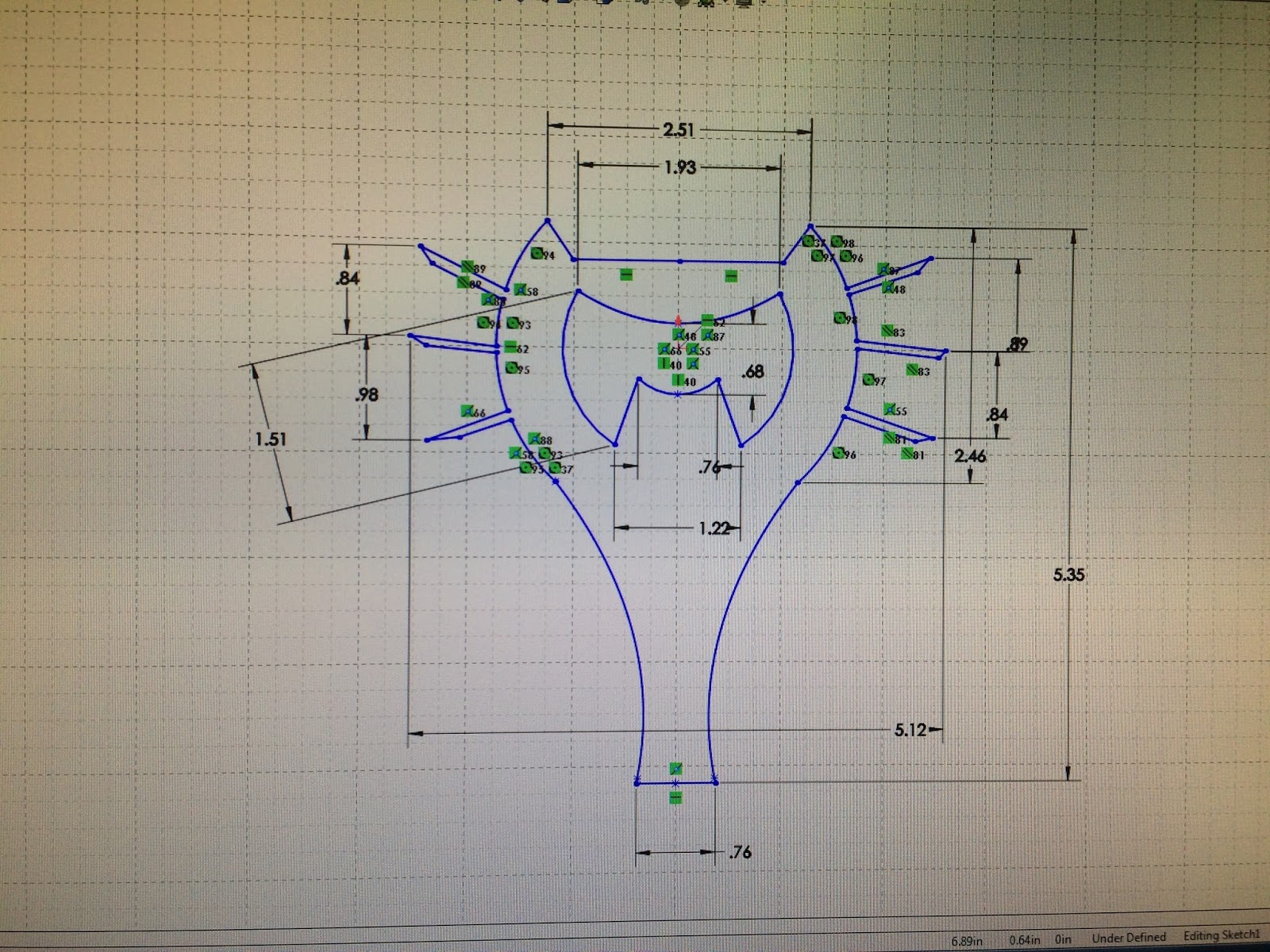
Measurements:
Top Left: triangular support piece 1
Top Center: general measurements for the triangular supports
Top Right: triangular support piece 2
Bottom Left: pegs and slots
Bottom Center: slanted support beams
Bottom Right: overall windlass 2D surface area measurements
Day 3: Building
Using SolidWorks, we created pieces for our windlass. In order to save material and stay within the delrin limit, many parts were cut out.
Iteration 1:

Design 2 posed a problem with the crank attached to the side of a triangular support. We moved it to go in between the supports. However, with a crank, the crank would not turn unless on the outside of the side supports. This forced us to move the pulley system to one side of our windlass in offer for our crank to work.
Initially, we wanted three delrin rods within the wheels for the string to wrap around, not including the middle piece, but we ran out. In our first model, there is a long piece for the center, a medium piece for the crank, and a small piece for just the wheels.
After testing, our model failed. The entire windlass was lopsided. Slanted triangular supports, pulley off to one side, two rods for the wheel - they all contributed to an uneven windlass.
Day 4: Final Building and Testing
Design 3/Iteration 2:

To create a more balanced windlass, we put the wheel in the center of the windlass and created supports going across rather than diagonal.
With the already cut delrin rod, I took the medium sized rod and cut that in half to put three rods in between the wheels as initially planned. I made a handle with delrin sheets but realized a one-finger approach was needed in order to crank it which posed not only difficult but also uncomfortable.
The wheels, our pulley system, was our cantilever. With now three rods of shorter lengths for the string to wrap around, our cantilever was more reliable and was able to withstand more force.

After cutting the medium sized delrin rod in half, the original small sized delrin rod had an extra few centimeters to be cut off and connected to the other end of the handle for an easy crank.
However, with the large force and weight of the liter water, when cranking, the wheel and handle would spin in circles around the center delrin rod. For an easy fix, Jenny and I used the drill press to drill a hole trough the delrin sheet and rod while inserting a piano wire to ensure the rod, wheels, and handle would move as a unit.
As a last minute touch, we added tight bushings to the rod and side triangular supports to reduce moving of the pulley while in use.
Here is a video of our final windlass model:
Obstacles:
While using the laser cutter to cut our pieces, the extreme heat and constant usage of the laser cutter created bending of the material. This caused difficulties with precise measurements for pegs and slots and would create different cut lines.
The laser cutter was also very unpredictable with cutting. Many times, our parts would not cut through resulting in more repeat cut lines, resulting in more bent material.
Further Improvements:
With more time, Jenny and I would reduce the material used by scaling the windlass down and use that excess material to create something to pin or clamp our windlass to the desk in order to use the windlass with one hand. In addition, we would change the material to increase the Young's modulus so the rod in the middle would not bend due to extreme amounts of force.
 Task/Challenge:
Task/Challenge:
 Day 1:
Day 1:
 Day 2:
Day 2:
 Without thinking about reducing the gear ratio, we concluded 1:25 was the best gear ratio for the fastest car.
Without thinking about reducing the gear ratio, we concluded 1:25 was the best gear ratio for the fastest car.








































{kind=link}